Synthetic Dataset Generation for Industrial Object Pose Estimation

Synthetic Dataset Generation for Industrial Object Pose Estimation
Technology Stack
Project Overview
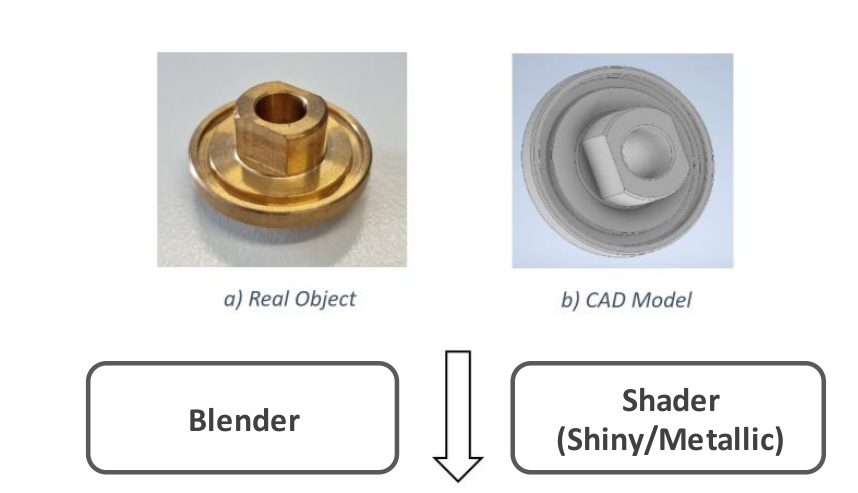
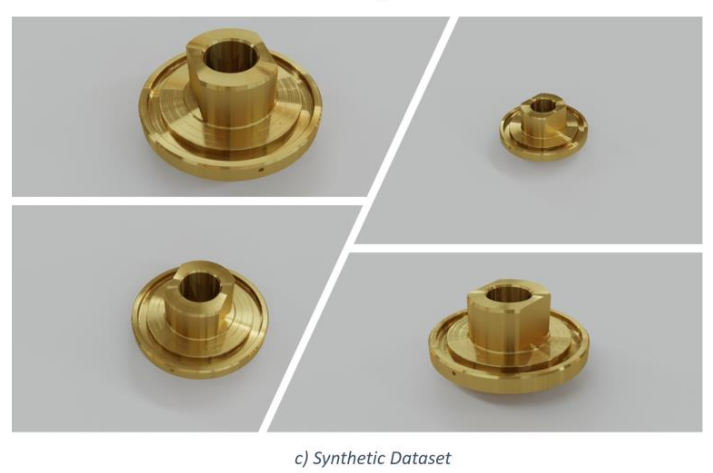
This project focuses on creating a synthetic dataset generation pipeline tailored for industrial robotics applications. By leveraging BlenderProc, the framework generates photorealistic datasets that replicate the reflective and metallic characteristics of industrial objects. These datasets include object poses, RGB images, and object masks, enabling robust training of pose estimation models. The pipeline is designed to handle challenges posed by metallic and symmetric objects, which are common in industrial settings, by incorporating customized shaders and adaptive camera angles. The generated datasets are used to train state-of-the-art pose estimation methods, ensuring precise perception systems for flexible industrial manipulation tasks.