DFL-TORO: A Demonstration Framework for Learning Time-Optimal Robotic Manufacturing Tasks
Project Overview
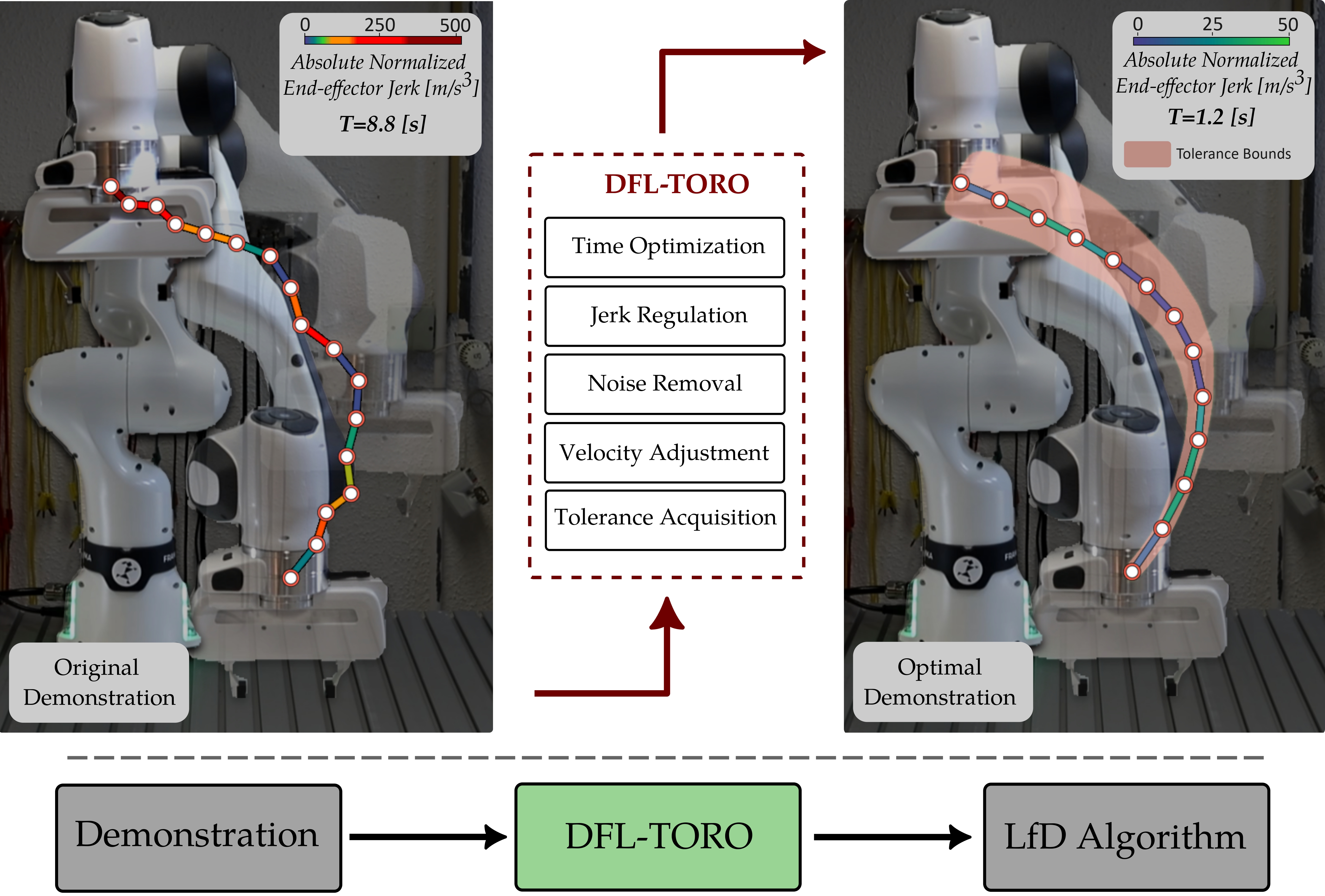
DFL-TORO is an open-source framework designed to enhance Learning from Demonstration (LfD) in robotic manufacturing. It enables intuitive, one-shot kinesthetic demonstrations, minimizing the need for multiple teaching sessions. The framework employs an optimization-based smoothing algorithm to generate time-optimal, jerk-regulated trajectories that comply with a robot’s kinematic constraints, resulting in precise and efficient task execution. Evaluated on platforms like the Franka Emika FR3 and ABB Dual-arm YuMi, DFL-TORO addresses challenges in Industry 4.0 by simplifying robotic programming for non-experts. Its standardized, modular architecture allows seamless integration of various LfD algorithms, making it adaptable across different robotic systems. The high-level programming interface empowers users to design complex robotic tasks intuitively, eliminating the need for intricate manual coding.